![]()
| ギャラリー |
| Tさんが「人の役に立つロボットを作る人になりたい」という夢を抱きながら、富山県立大学工学部知能ロボット工学科に短期入門した様子を紹介します。 |
| 期間:平成30年8月6日(月)、8月8日(水) |
| 富山県立大学工学部知能ロボット工学科 射水市黒河5180番地 |
 |
 |
 |
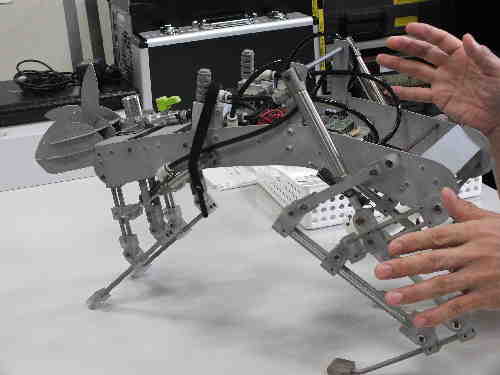
| 今回の入門でお世話になった 教授 大島 徹 先生 に2日間の入門で、何を学ぶのかを詳しく教えていただきました。 右写真は、大島教授が作られたウサギ型ロボットです。空気圧によって実際に跳びはねることができるそうです。 |
 |
||
 |
 |
 |
| 大島先生が研究された、義手を見せていただきました。使用者のために、少しでも違和感を感じさせないような工夫がなされています。また、店先などで見かけるヒト型ロボットも見せていただきましたが、このロボットは力が弱く、手でペットボトル飲料を持つこともできないそうです。ロボットの手で力を加減しながらモノを握るという動作は、難しい技術なのだと教えていただきました。 | ||
 |
 |
 |
| 耳、音に関する研究室です。上、前後左右あらゆる方向にスピーカーがあり、どの方向からでも音を出すことができます(中)。天井、床、壁で音が反射しにくくしてある部屋です。とても静かで何ともいえない不思議な感覚です(右)。 | ||
 |
 |
 |
| ロボットの部品などは、大学内の工房で作ることが多いそうです。工房内には、たくさんの工作機械が設置されていました。この日は、旋盤やフライス盤で部品を作っておられるところを見学しました。 | ||
| ロボットの語源 チェコスロバキアで人気のあった作家 カレル・チャペックが、1920年に戯曲『R.U.R』(ロッサム万能ロボット会社)において、「労働」を意味するチェコ語「robota (ロボタ)」から ロボット という言葉を作ったといわれるそうです。 |  |
|
| ロボット三原則 SF作家アイザック・アシモフの小説において、ロボットが従うべきとして示された原則で、「人間への安全性、命令への服従、自己防衛」を目的とする3つの原則から成っています。 第1条:ロボットは人間に危害を加えてはならない。また、その危険を看過することによって、人間に危害を及ぼしてはならない。【安全性】 第2条:ロボットは人間に与えられた命令に服従しなければならない。ただし、与えられた命令が第1条に反する場合は、この限りでない。【操作性】 第3条:ロボットは、第1条および第2条に反する恐れのない限り、自己を守らなければならない。【耐久性】 |
||
 |
看護:病気や怪我を治すための手助けを行うこと【日常生活動作】 介護:日常生活の手助けを行うこと。不自由なく、安心して、人間らしく暮らせること【生活の質】 産業の中でロボット技術が発展してきたので、様々な状態、目的、環境へ対応することが可能になりました。その結果、看護・介護へもロボット技術が導入されるようになったそうです。 |
|
| ロボットによる看護・介護の考え方 看護や介護をロボットが代わりにする。人にできないことをロボットにしてもらう。 【否定的な意見】看護・介護はホスピタリティが重要、人と人の温かい思いやり・ふれあいが大切、ロボットによる機械的な看護や介護に反対。 【肯定的な意見】優しくはしてあげたいが余裕がない、ロボットによる機械的な看護や介護に賛成、仕方がない。 【介護者の立場】24時間専念できない。自分のことで精一杯。 → 看護・介護をロボットに助けてもらう。 【被介護者の立場】負担をかけたくない。自分のことは自分でしたい。 → できないことをロボットに助けてもらって自分でする。 ロボットの助けを借りて、介護者の肉体的・精神的な負担を軽減するとともに、被介護者の意志を尊重し、自立を支援する。その結果、双方の精神的な負担が軽減され、介護者と被介護者間の円滑なコミュニケーションが増大することが、期待されます。 |
||
| これからのロボットの課題 ・他のロボットや機械とのコミュニケーション技術 ・ヒトとのコミュニケーション技術 ・ヒトへの安全技術 ・巧みに操るマニピュレーション技術 ・どこへでも行ける移動技術 ・長時間駆動できるエネルギー技術 |
 |
 |
 |
 |
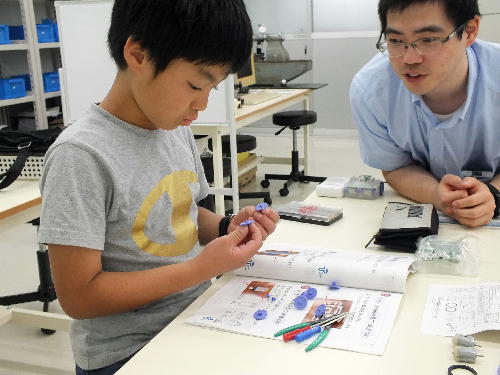
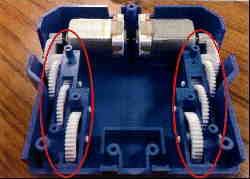
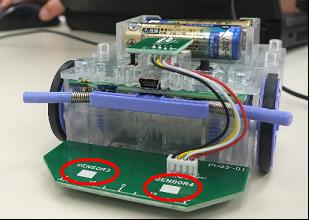
| ライントレースロボットについて教えてくださったのは、助教 玉本拓巳 先生 です。 2つのモータ、ギヤホルダ、触覚センサ(中下・赤矢印)、バンパ(中下・青矢印)、ギヤ(左下)、タイヤ、ライントレースユニット(右下)を順に取り付けていきます。ギヤにグリスを塗るところが、少し難しかったです。 |
||
 |
 |
 |
| それぞれのセンサから得られた情報をもとに、モータを制御します。ライントレースユニットには、2つの赤外線センサがついています。また、本体にはコンピュータで作成した命令(プログラム)を記憶して、センサから得られた情報から状況を判断し、モータに指令を出す装置がついています。 ロボットの動作確認をしたときの動画はこちら「robot1.mp4」 |
||
 |
 |
 |
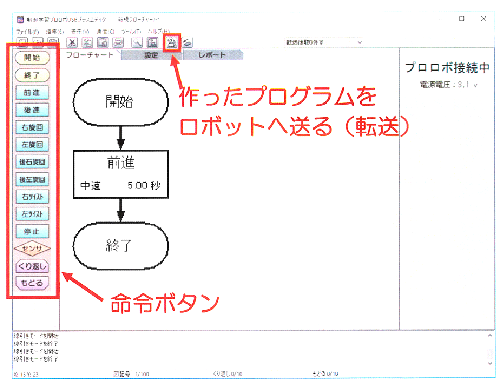
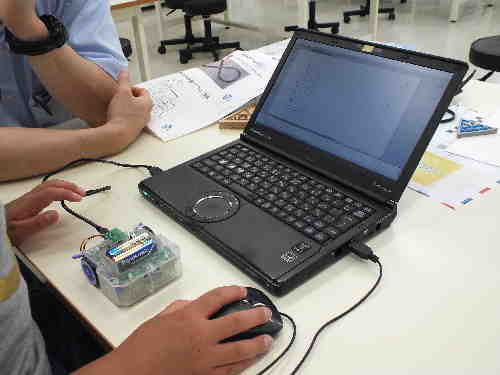
| ロボットを思い通りに走らせるには、プログラムが必要です。プログラミングとは、コンピュータを使ってロボットに「〜をして」と指示することです。専用のソフトでプログラムを作成しました。前進と後退、左右の旋回、後左右の旋回、左右のツイスト、停止の命令を組み合わせます(左)。できあがったら、USBケーブルを使ってロボットにプログラムを送ります(中)。最初は、センサは使わずにプログラム上の命令だけで、コースを走らせました(右)。 前進、右旋回、ツイストなどの時間を細かく調整し、何度も試走して予定のコースをクリアすることができました。 |
||
 |
 |
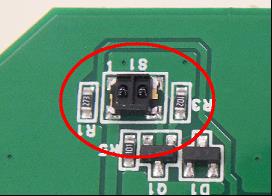 |
| ライントレースユニットの2つの赤外線センサを使って、コースを走らせます。センサは、白と黒の違いを見分けることができます。 | ||
 |
||
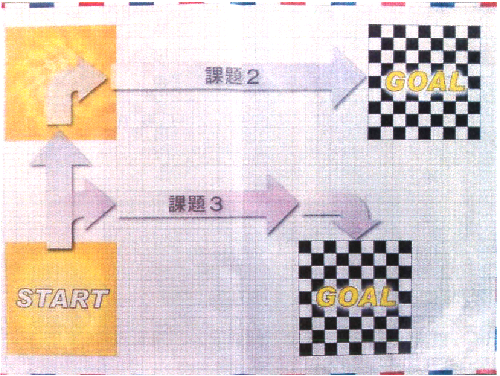
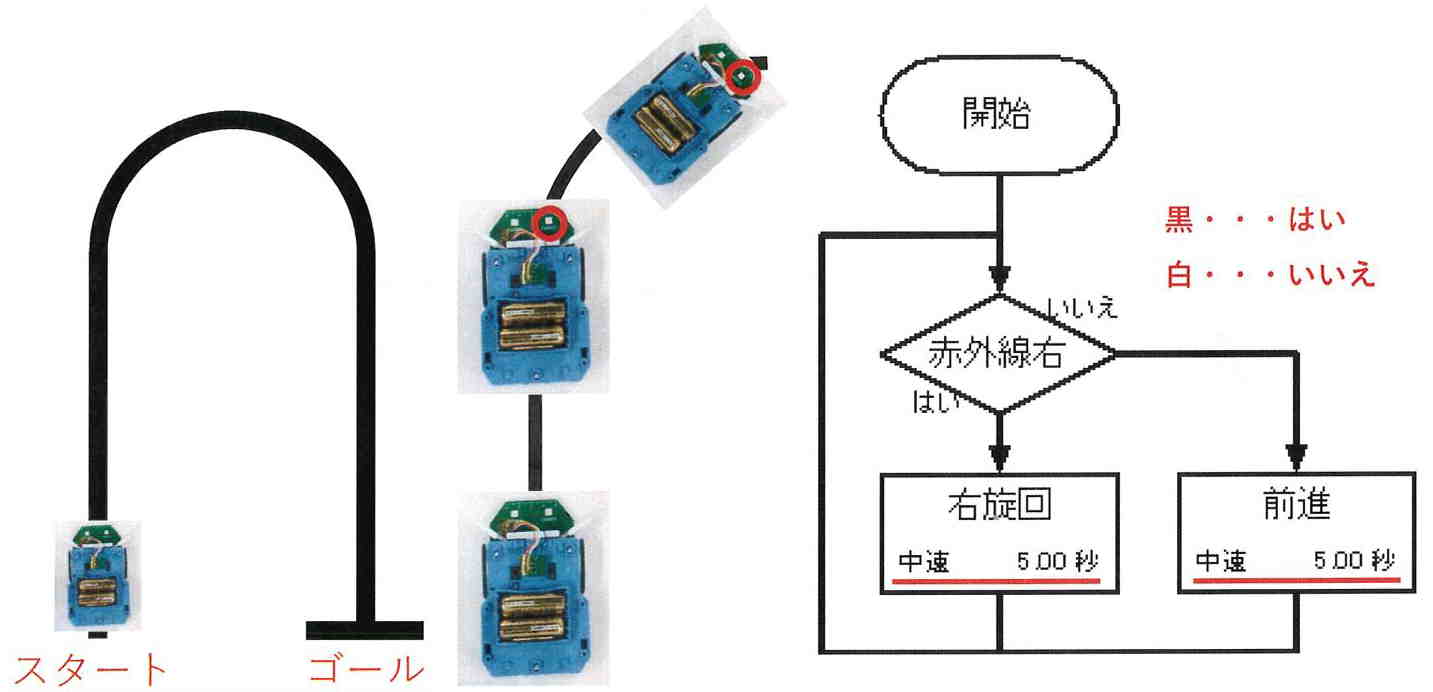
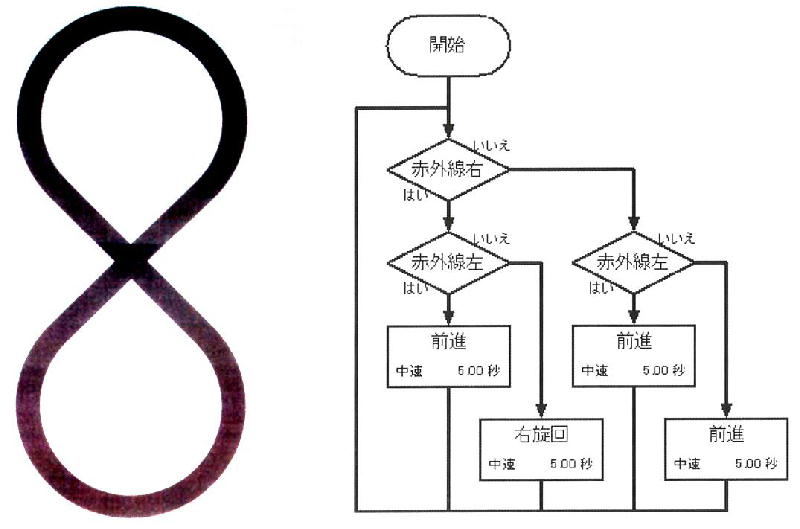
| プログラム(右)にあるように、右のセンサが黒に反応すると右に旋回します。その命令を繰り返します(ループ)。あとは、コースを試走させ速度と時間を調整し、ゴールに到達することができました。 次に、下のような8の字コースです。上の右カーブのプログラムを組み合わせればできそうです。ただし、左右2つのセンサを使う必要があります。 |
||
 |
||
 |
||
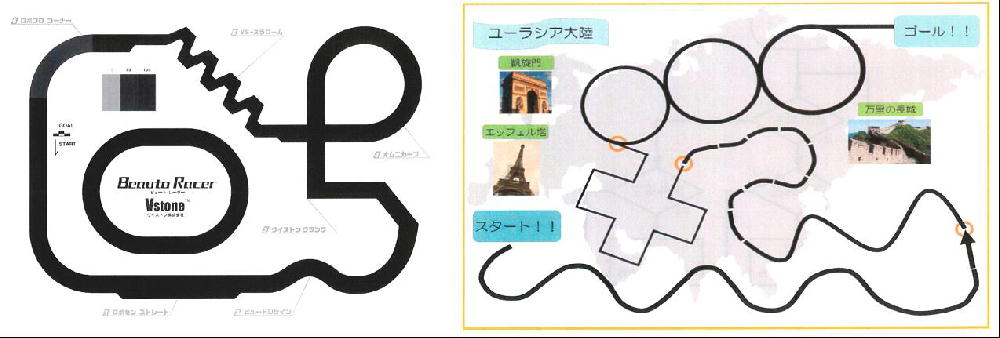
| 単純そうなコースに見えましたが、プログラムを組んでみるとその大変さがよく分かりました。なかなか思い通りに走ってくれません。左のコースはなんとかゴールまでたどり着きましたが、右のコースは時間内にクリアすることができませんでした。 コースを走るロボットの動画はこちら「robot2.mp4」 |
||
 |
 |
 |
 |
大島先生が、ロボットに関わるようになったきっかけは、義手だそうです。ものづくりだけでなく動物などの生きものも大好きだそうで、ロボット製作ではその両方に関わることができるそうです。しかし、義手については長く研究をしてきても未だ完成には到達しないそうで、日々研究を重ねて一歩でもゴールに近づけるように取り組んでおられるそうです。 |
| 今回の入門で、ロボットについてたくさんの知識を得ることができました。ひとつのロボットを作るためにも、様々な工程があり、とても複雑で難しいと感じることがたくさんあります。ですが、それがロボットづくりの魅力ではないかと思いました。 |  |